The Arm
Introduction


The arm during construction
The arm is a 3 stage nested tube stock assembly powered by springs. Its a design we’ve become familiar with. It is powered by a pair of Rev NEO motors. One for its angle, and another for its extension.

The angle is determined by a lead screw and lifting arm assembly so as to avoid excessive motor load and precise location tuning.
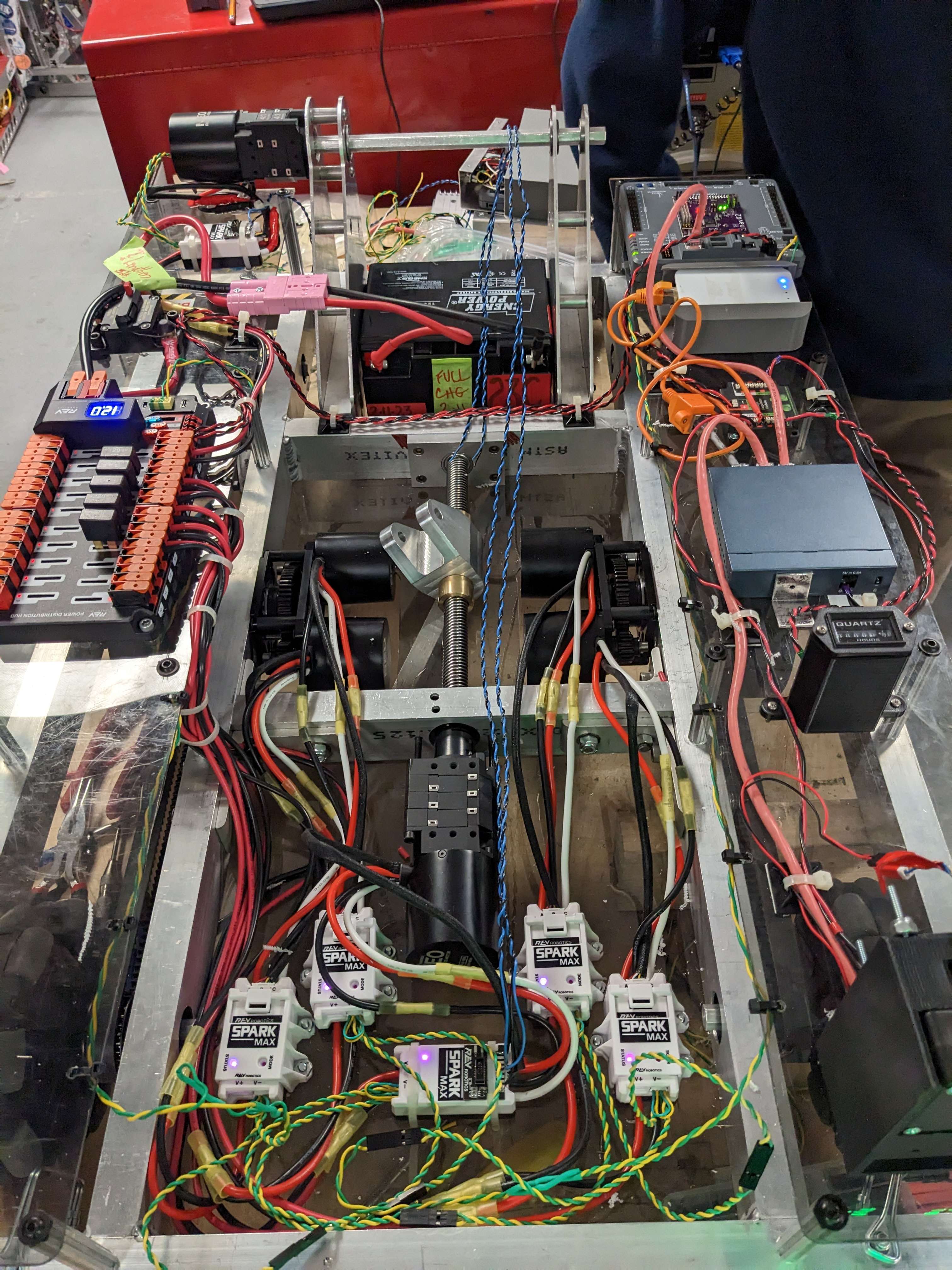
A close up of the lead screw
Software

The arm is driven using the embedded PID loops on both its motors. Limit switches limit its maximum extents to protect the robot from damage.
Config Files
arm:
elevatorMotor: # Drives the spool to move the lift in and out
MotorPort: 5 # Updated 1/22 by Keegan
Inverted: False # Updated 1/22 by Keegan
LimitSwitch: 0 # Updated 2/15 by Keegan
ConversionFactor: 1 # Updated 1/18 by Joe
Start: 0 # Updated 3/18 by Keegan
ladderMotor: # Drives the lead screw to run the lift up and down
MotorPort: 6 # Updated 1/22 by Keegan
Inverted: False # Updated 1/22 by Keegan
arm:
elevator:
kp: 0.075
ki: 0
kd: 0.1
ff: 0
ladder:
kp: 0.1
ki: 0
kd: 0.1
ff: 0